

Introduction — a kitchen-light moment with numbers on the bench
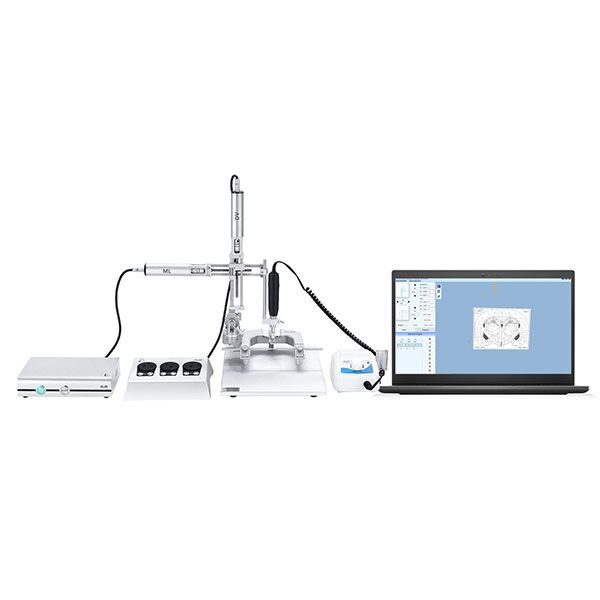
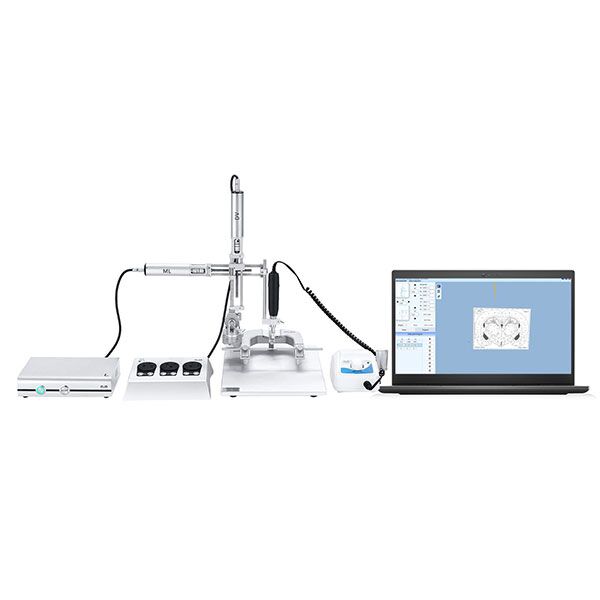
I remember a late night in the lab, the bench lamp smelling faintly of metal and coffee, a tiny mouse held steady under a soft glass dome. Then we set up an automated stereotaxic Instrument next to the lamp, and the room changed: clicks became confident, hands relaxed. Labs report that manual placement error often runs into several hundred microns; that kind of drift eats experiments and patience alike. So I ask: how do we fix a workflow that looks precise but still loses time, tissue, and trust?
The scene was simple—warm light, chilled instruments, and the whisper of a fan—and yet the data on placement variance was loud. You can taste the difference between a clean alignment and a guess. As someone who has stayed late to troubleshoot coordinates and micro-manipulators, I feel the practical sting of errors. What follows is a close look at where traditional approaches break down and what matters when you choose tech for live, delicate work. Let’s peel back the layers and get practical.
Part 2 — Where tradition breaks: the hidden pain under the hood
small animal stereotaxic instrument users often start with confidence, then discover the tiny compromises that wreck reproducibility. In my view, the main failures are not dramatic; they are small, cumulative, and metabolic. A rigid stereotaxic frame can transfer vibration. Micro-manipulators drift with heat. Coordinate mapping assumes perfect anatomy—rare in live subjects. These are not design blunders so much as ignored realities. Look, it’s simpler than you think: a 0.2 mm shift in probe depth can mean the difference between a clear signal and noise.
What exactly goes wrong?
First, human error in manual alignment remains high despite training. Second, many setups lack feedback: no real-time position verification, no compensation for soft-tissue movement. Third, power delivery and control electronics (power converters, servo motors) can introduce subtle jitter. I’ve seen edge cases where a cable bundle tugged during a long run altered an entire dataset—funny how that works, right? To fix this we must treat the instrument as a system: mechanical, electronic, and biological factors all interact. The result is that even automated rigs can inherit legacy problems unless designers address coordinate system calibration, thermal drift, and instrument ergonomics together.
Part 3 — Looking forward: practical pathways and what to expect
What’s next is about principles more than gadgets. When I think of future-proof upgrades, I prioritize closed-loop feedback, modular calibration routines, and better user interfaces that reflect real anatomy. Modern small animal stereotaxic instrument designs should include sensor fusion—optical checks combined with encoder data—to correct in real time. That reduces dependence on single-point alignment and gives you confidence during long experiments. I don’t want hype; I want measurable gains: less trial loss, faster setup, clearer results.
Real-world impact and the metrics I use
Here are three evaluation metrics I recommend when choosing a platform: 1) positional repeatability under real load (not just specs), 2) onboard verification methods (optical or electronic), and 3) integration ease with your legacy tools and workflows. Test these in a short pilot run. If a system can halve your redo rate, it paid for itself. If it improves electrode placement consistency by measurable microns, you’ll feel it in every downstream result—yes, that matters. In closing, I weigh options by practical outcomes, not glossy brochures. For reliable instruments and support, I often point colleagues toward solutions like BPLabLine when they ask for a dependable starting point — and I mean that from hands-on experience.